COMSOL has the best multiphysical simulation capabilities in my experience. Technical support from Elisa at TECHNIC as well as the engineers at COMSOL has been great.
COMSOL is an important part of our research in plasma physics. We use it in the design of plasma systems and it helps us to obtain a greater understanding of the underlying physics. We have always valued the quick support from TECHNIC and COMSOL and it has been a pleasure to work with them.
Comsol has become a valuable part of our design and decision making process. The exceptional flexibility and access to the physics and solvers in Comsol has allowed us to have deeper understanding on thermomechanical solutions. Technic and Comsol have always been quick and helpful to resolve any issues and provide helpful advice on their products.
At Scion we use COMSOL Multiphysics to understand energy processes, such as the interplay of non-linear solid mechanics and heat & mass transfer during biomass compaction, to design new or more efficient processes.
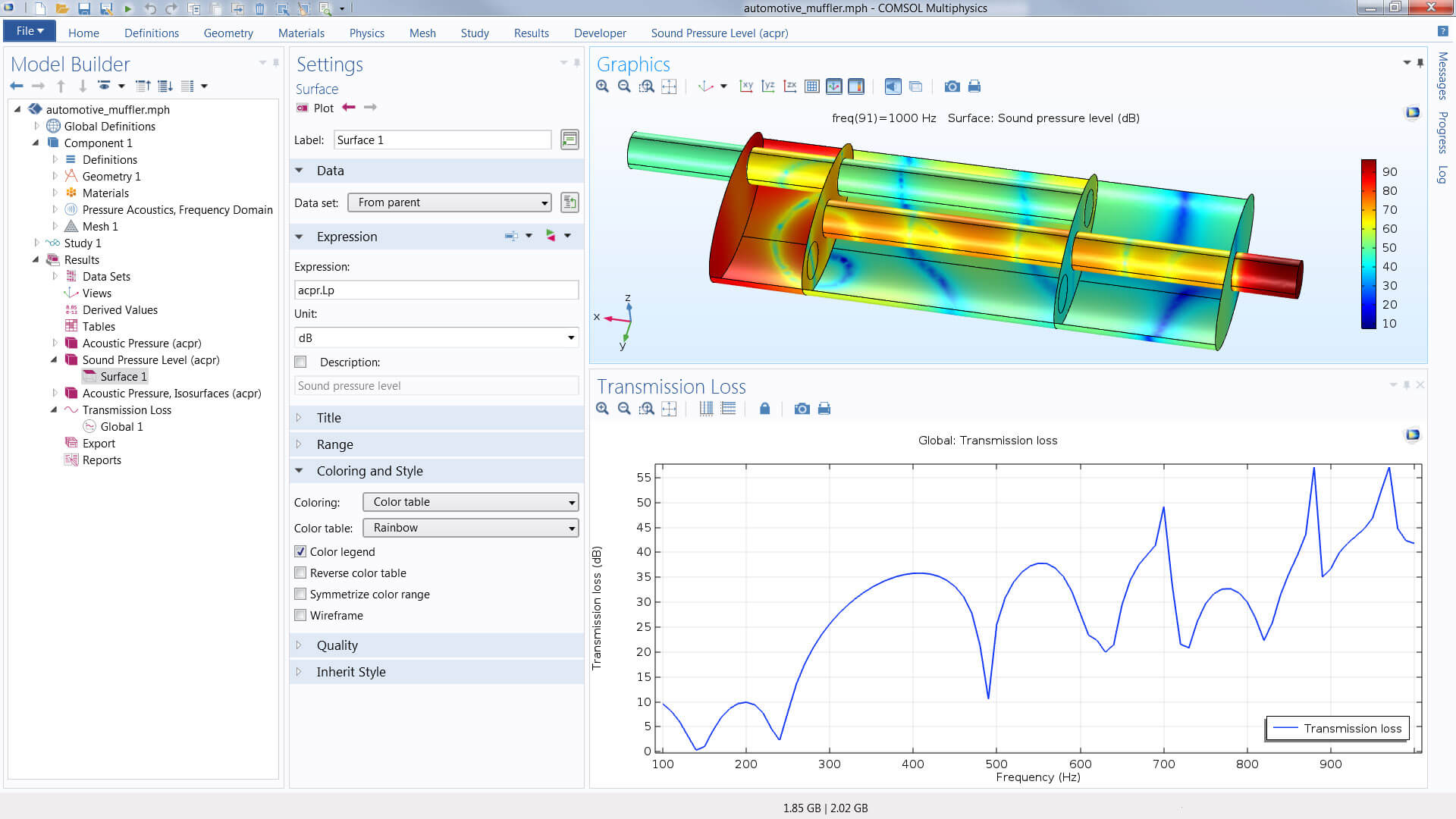
We use COMSOL Multiphysics to design the customised muffler. With it, we can simulate the insertion loss at different spectrum with different muffler designs.
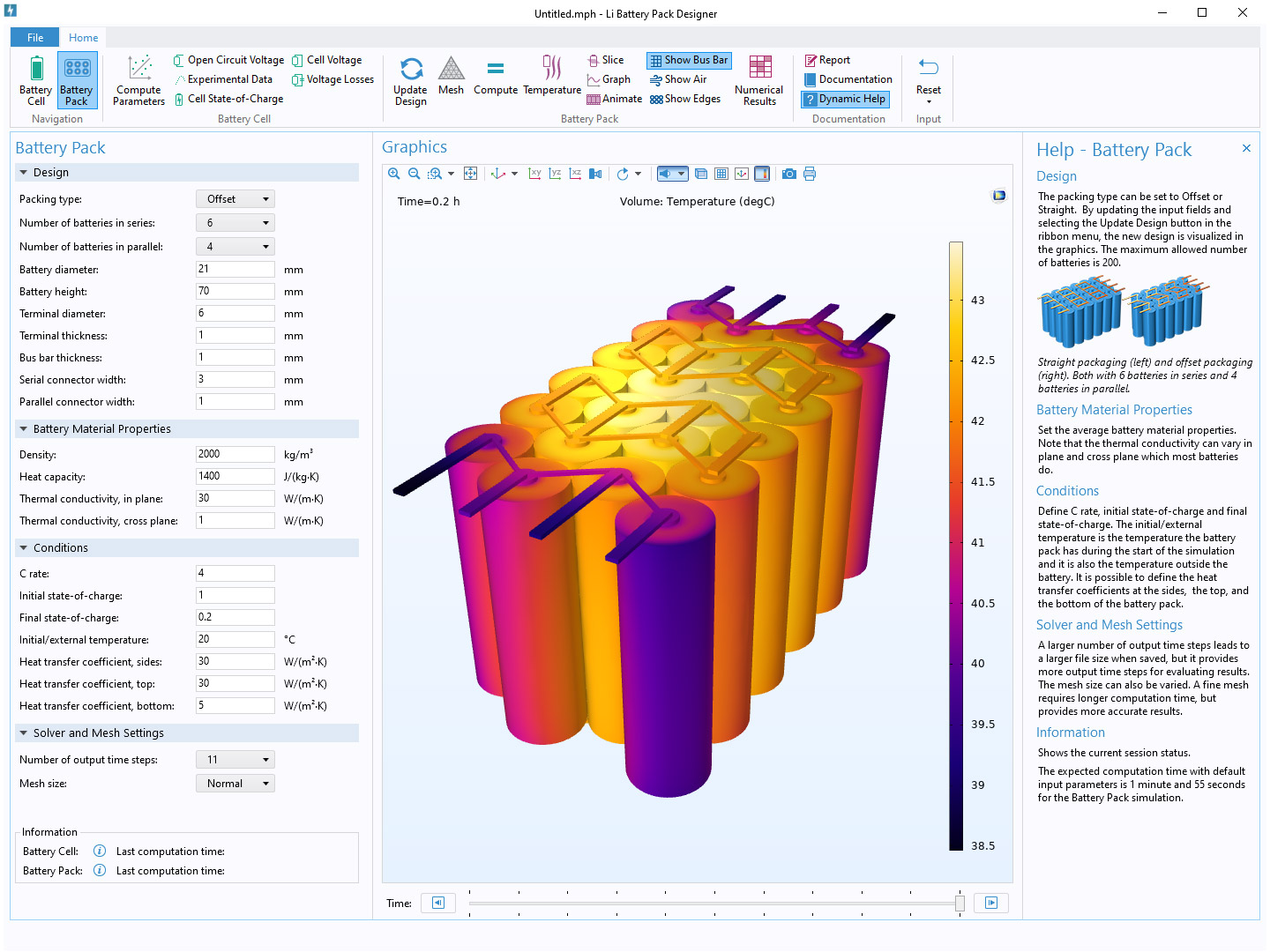
The COMSOL Multiphysics® software includes the Application Builder, which helps you build custom simulation applications based on your models. By deploying your apps, you can share the power of simulation with colleagues in other departments and to customers outside of your organisation.
The Application Builder enables simulation experts to create intuitive user interfaces for their computational models — ready-to-use custom applications. The app user is then focused on the input parameters and computational results that matter, without requiring foreknowledge of the underlying model.
The Application Builder is included in the Windows® version of COMSOL Multiphysics® and accessible from the COMSOL Desktop® environment. While you need Windows® to build apps, they can be run on macOS and the Linux®operating system as well.
COMSOL apps are custom-made simulation tools that contain all the benefits of a model built with the Model Builder, without the extraneous information. The general model can serve as a starting point for several different apps, each with its own restricted input and output options relevant for a specific task.
The Application Builder in COMSOL Multiphysics® provides all functionality needed to build comprehensive simulation apps. For example, you can:
Beyond the built-in tools, you can write methods in the Java® programming language. There are very few limitations for what you can include in an app.
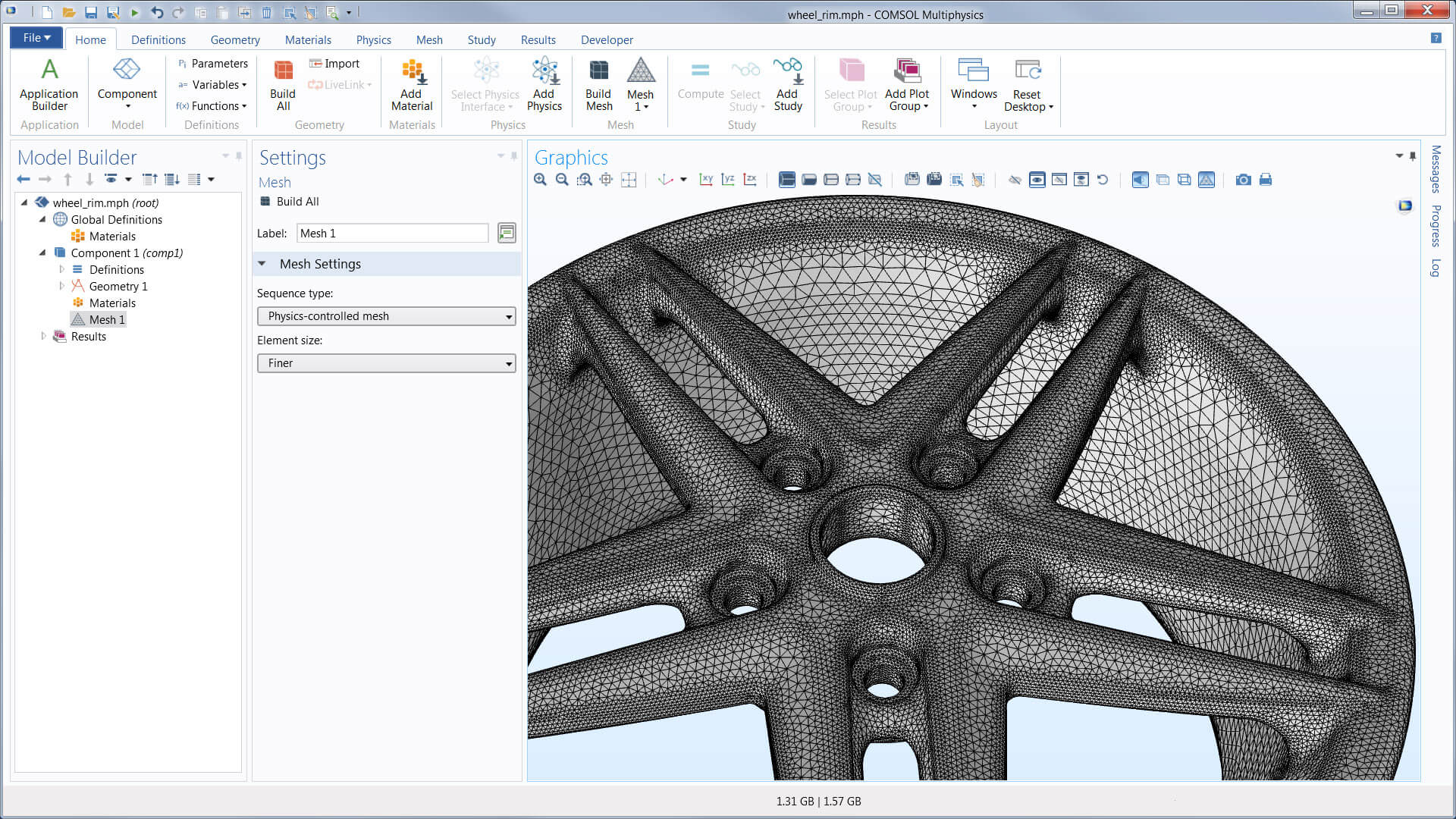
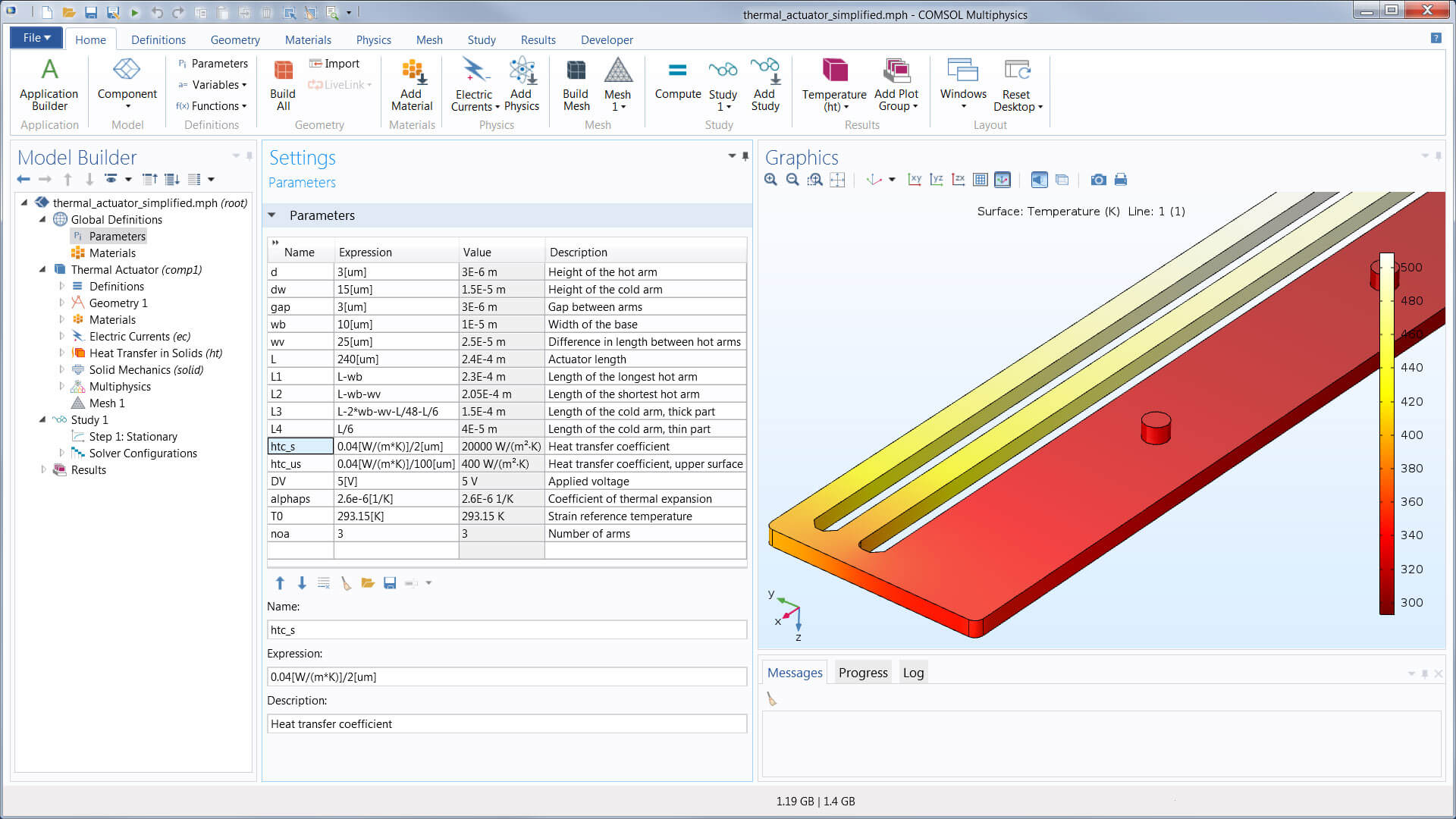
The Form Editor lets you design a user interface by using drag-and-drop capabilities to place widgets such as input fields, buttons, sliders, knobs, check boxes, and radio buttons. No programming is required for this, but the entire process is user-interface driven. If the model makes use of parameters and variables, you link these directly to input fields in the application. In this way, the user of an app can directly edit the values of the parameters and variables that affect the model. In one click, you can include a button in your app that runs a study node and thereby starts the solver. Just as quickly, you can include graphics and numerical outputs. Your apps can have multiple graphics windows with interactive 3D graphics, as well as 2D or 1D graphics.
The Method Editor provides a programming environment that allows you to write code for actions not covered by the tools in the Model Builder. The methods may, for example, execute loops, process inputs and outputs, and send messages and alerts to the user of the app. The Java® programming language is used to write COMSOL methods, which means that all Java® syntax and Java® libraries can be used. Additionally, the Application Builder has its own built-in library of methods for building applications and modifying the model object. The Application Builder includes several tools for automatically generating code. These tools include conversion of command sequences to methods, recording of code, and code completion, allowing you to get up and running quickly with programming tasks even if you are not familiar with the syntax. The autogenerated code shows you the names of properties, parameters, and variables with tooltips describing their meaning, minimising the need to consult the product documentation.
After building an app with the COMSOL Multiphysics® software, you can test and run it from the COMSOL Desktop® using Windows®, macOS, and Linux® operating systems. When you test an app in COMSOL Multiphysics®, it opens a separate window with the app's user interface while keeping the Application Builder desktop environment running. While testing an app, you can apply changes to forms, methods, and the embedded model and they will appear live.
You can also test the app in a web browser. This functionality makes it easy to test the look and feel of the app when it is accessed from a web browser connected to a COMSOL Server™ installation. You can choose which of your installed web browsers you would like the app to launch in. The app will open in a separate browser window with the application's user interface while keeping the Application Builder desktop environment running.
The Application Libraries, available in both COMSOL Multiphysics® and COMSOL Server™, have lots of examples for you to use and get inspired by when creating your own apps. The Application Libraries include more than 30 example apps that you can run, inspect, modify, or copy contents from into your own apps. Some of these apps function as ready-to-use simulations in their own right, whereas others are for demonstrating certain functionality of the Application Builder or for educational purposes in an academic setting.
Explore the features and functionality of the Model Builder in more detail by expanding the sections below.
1 Requires the Design Module
2 The corresponding 3D operations require the Design Module
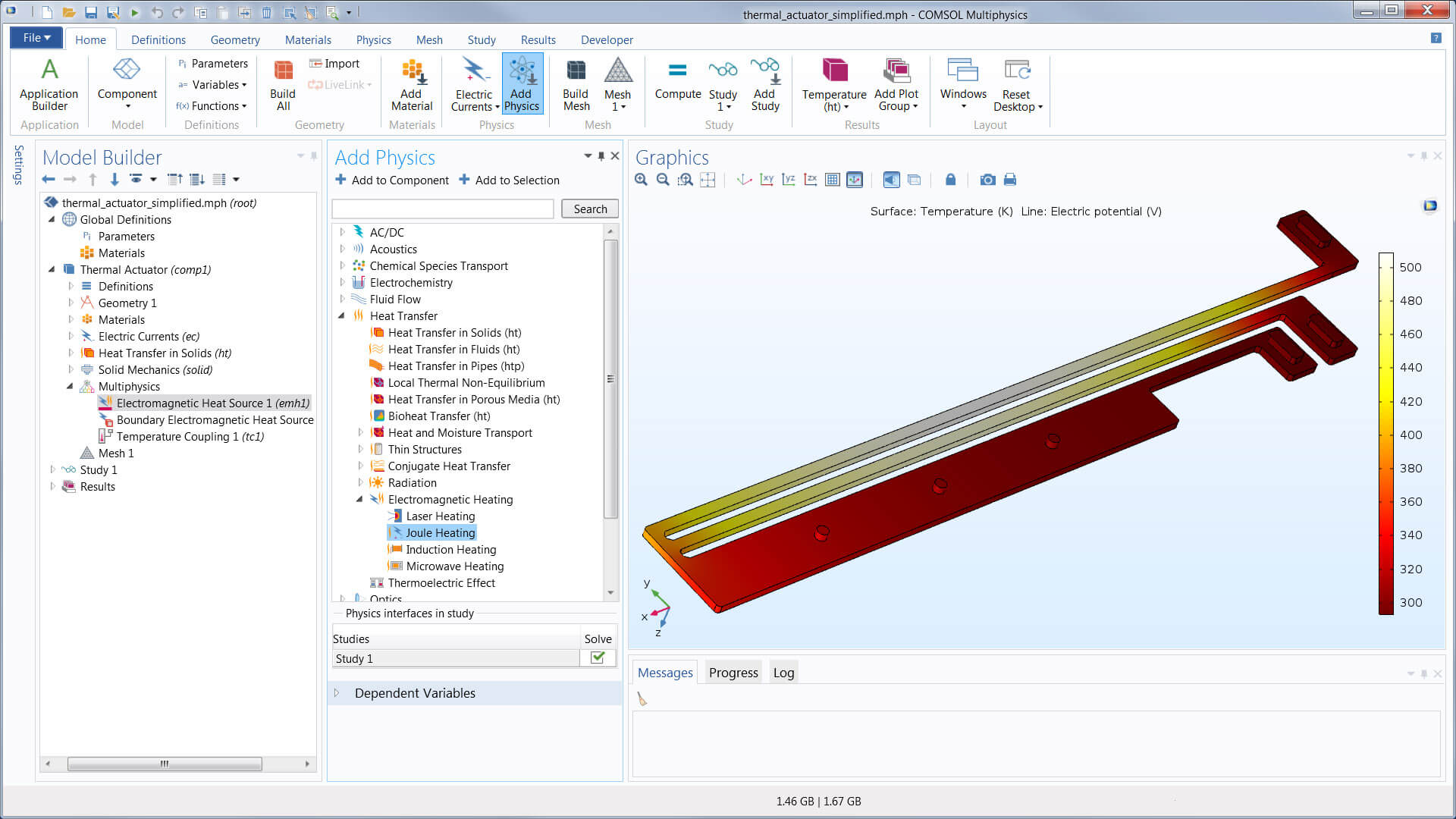
Physics interfaces
Materials
Any study step can be run with a parametric sweep, which can include one or multiple parameters in a model, from geometry parameters to settings in the physics definitions. Sweeps can also be performed using different materials and their defined properties, as well as over lists of defined functions.
Optimisation studies, using the Optimisation Module, can be performed for topology optimisation, shape optimisation, or parameter estimations based on a multiphysics model. COMSOL Multiphysics® offers both gradient-free and gradient-based methods for optimisation. For parameter estimation, least-squares formulations and general optimisation problem formulations are available. Built-in sensitivity studies are also available, where they compute the sensitivity of an objective function with respect to any parameter in the model.
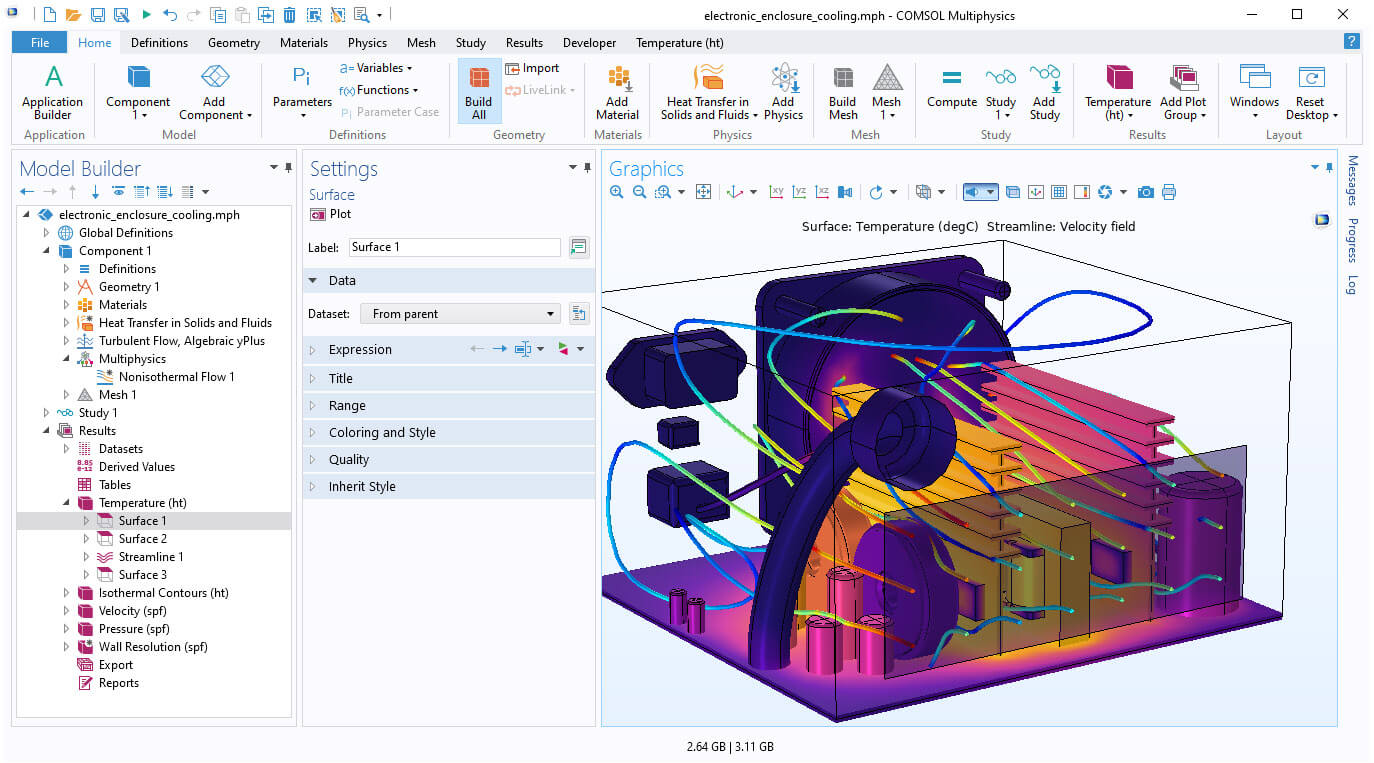
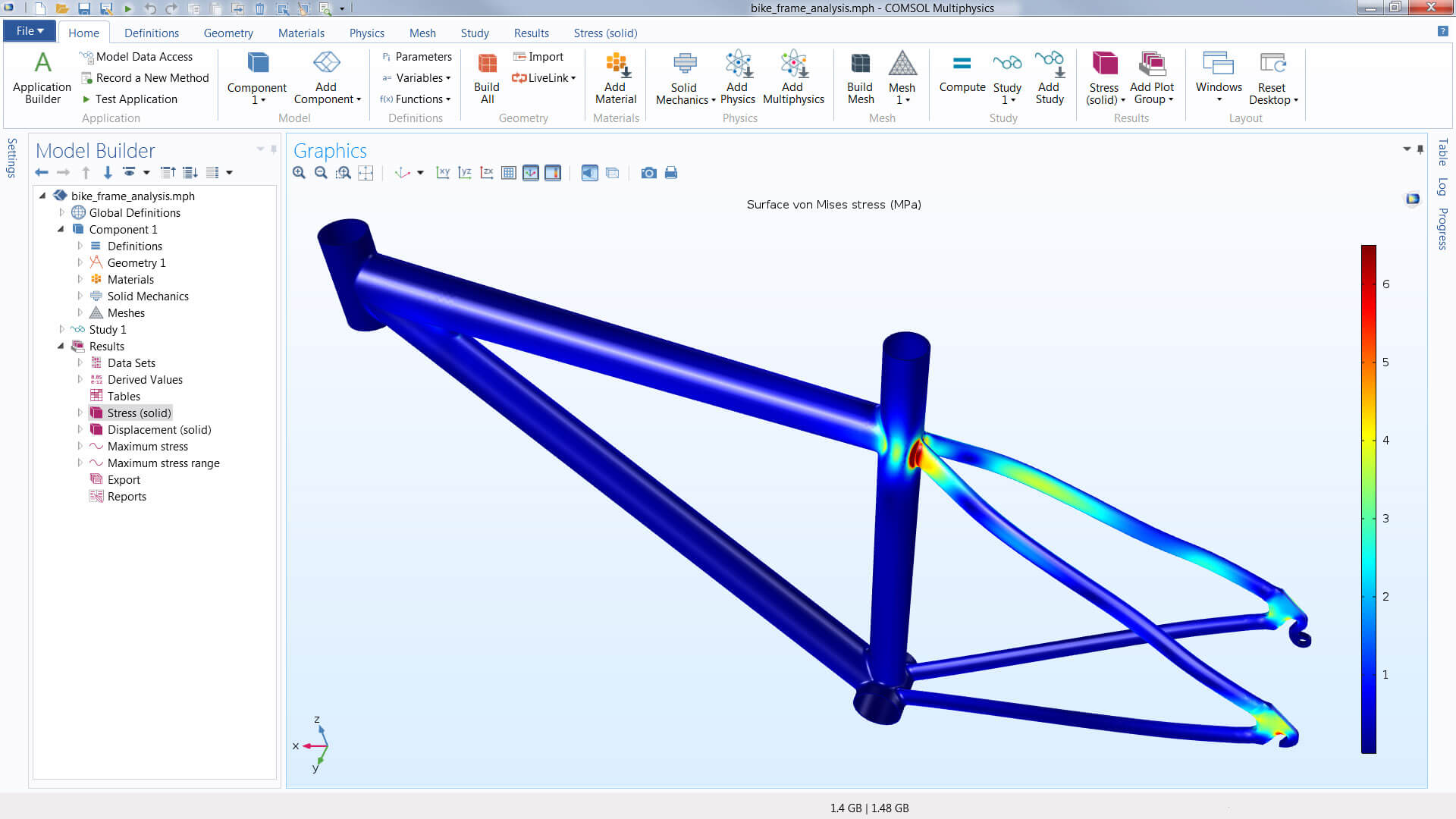
Show off your results to the world. COMSOL Multiphysics® sports powerful visualisation and postprocessing tools so that you can present your results in a meaningful and polished manner. You can use the built-in tools or expand your visualisations with derived physical quantities by entering mathematical expressions into the software. Therefore, you can visualise just about any quantity of interest related to your simulation results in COMSOL Multiphysics®.
Visualisation capabilities include surface, slice, isosurface, cut plane, arrow, and streamline plots, to name just a few plot types. A range of numerical postprocessing tools are available for evaluation of expressions, such as integrals and derivatives. You can compute the max, min, average, and integrated values of any quantity or derived quantities throughout volumes, on surfaces, along curved edges, and at points. Postprocessing tools specific to certain areas of engineering and science have also been included in many of the physics-based modules.
You can export data and process it via third-party tools. Numerical results can be exported to text files on the .txt, .dat, and .csv formats as well as to the unstructured VTK format. With LiveLink™ for Excel®, results can be exported to the Microsoft®Excel® spreadsheet software file format (.xlsx). Images can be exported to several common image formats, as well as the glTF™ file format for exporting 3D scenes. Animations can be exported in the WebM format and as animated GIF, Adobe®Flash® technology, or AVI files. Reports summarising the entire simulation project can be exported to HTML (.htm, .html) or Microsoft® Word® software format (.doc).
In order to fully evaluate whether or not the COMSOL Multiphysics® software will meet your requirements, you need to contact us. By talking to one of our sales representatives, you will get personalised recommendations and fully documented examples to help you get the most out of your evaluation and guide you to choose the best license option to suit your needs.
Fill in your contact details and any specific comments or questions, and submit. You will receive a response from a sales representative within one business day.
 Tel: +61 (03) 6224 8690Email: info@technic.com.auConnect on LinkedInGet Your Free Trial
Tel: +61 (03) 6224 8690Email: info@technic.com.auConnect on LinkedInGet Your Free TrialCopyright © 2021 Technic Pty Ltd. All Rights Reserved. See our Privacy Policy. Site protected by reCAPTCHA - Privacy | Terms. Website by Gloo.
